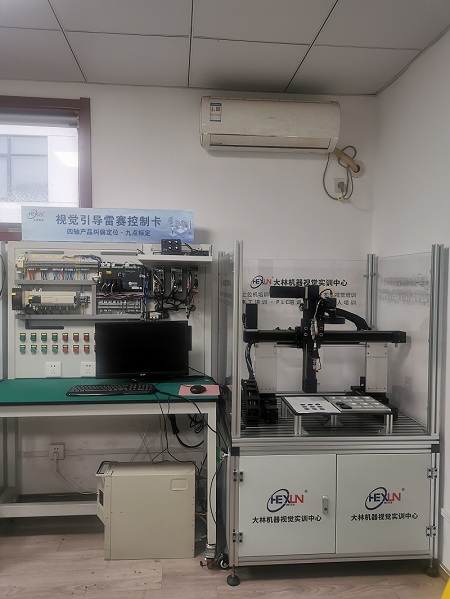
机器人摄像机标定
对摄像机的内部参数和外部参数进行求取的过程。视觉系统从摄像机获取的图像信息出发,计算三维环境中物体的位置、形状等几何信息,并由此重建三维物体。图像上每一点的位置与空间物体表面相应点的几何位置有关。这些位置的相互关系,由摄像机成像几何模型所决定,几何模型的参数称为摄像机参数,主要包括内参数和外参数。
咨询详情
其中内参数主要包括光轴中心点的图像坐标、成像平面坐标到图像坐标的放大系数、镜头畸变系数等。外参数是摄像机坐标系在参考坐标系中的表示。摄像机标定提供了非测量摄像机与专业摄像机之间的联系。而所谓非测量摄像机是指这样一类摄像机,其内部参数完全未知,部分未知或者原则上不确定。摄像机标定就是通过标定实验获得摄像机的内、外参数。
咨询详情视觉控制的结构与算法


机器人视觉运动控制培训内容
1
讲解视觉传感器(如工业相机)的工作方式,包括图像采集、像素和分辨率的概念。例如,介绍面阵相机和线阵相机的不同成像原理,以及它们在不同场景下的应用优势。深入学习图像处理的基本算法,如滤波(高斯滤波、中值滤波等)用于去除图像噪声,边缘检测算法(Canny
边缘检测等)用于提取物体的轮廓特征。
2
介绍目标识别和定位的方法,包括基于特征的识别(如形状特征、纹理特征等)和基于深度学习的识别(如卷积神经网络在目标识别中的应用
3
教授机器人运动学基础,包括正运动学(已知机器人关节角度,计算末端执行器的位置和姿态)和逆运动学(已知末端执行器的目标位置和姿态,求解关节角度)。以六轴工业机器人为例,详细讲解如何通过运动学方程计算机械臂各个关节的运动。
4
讲解机器人的动力学原理,如力和扭矩在机器人运动中的作用,以及如何根据动力学模型来优化机器人的运动速度和加速度,避免机械臂的振动和过载。
5
阐述视觉信息如何转换为运动控制指令,例如视觉系统识别出目标物体的三维坐标后,如何通过坐标变换和运动规划算法,将其转换为机器人各关节的运动角度和速度指令。介绍视觉反馈控制的概念,即机器人在运动过程中如何根据视觉系统实时反馈的信息(如目标物体的位置变化)来调整运动轨迹,确保准确地完成任务。